数据结构¶
算法可视化 具体实现方式可能有出入
1 绪论¶
1.1 数据结构基本概念¶
数据结构三要素:
- 逻辑结构
- 物理结构
- 数据的运算
数据逻辑结构:
- 集合
- 线性
- 树形
- 图
数据存储结构:
- 顺序存储
- 链式存储
- 索引存储
- 散列存储(哈希存储)
1.2 算法的基本概念¶
算法五个特性:
- 有穷性
- 确定性
- 可行性
- 输入
- 输出
好算法的特质:
- 正确性
- 可读性
- 健壮性
- 高效率和低存储
时间复杂度:常对幂指阶
\(O(n^3)<O(2^n)<O(n!)<O(n^n)\)
空间复杂度:空间复杂度是指算法需要的辅助空间的复杂度
递归时的空间复杂度,\(O(mn)\) ,\(O(m)\) 是每次递归中定义的变量的空间复杂度,\(O(n)\) 是递归深度复杂度
2 线性表¶
2.1 线性表的基本概念和基本操作¶
线性表的基本操作:创销,增删改查
2.2 顺序表¶
顺序存储的线性表
实现方式:静态分配,动态分配
2.3 链表¶
- 单链表:带头结点和不带头结点
- 不带头结点时,对第一位结点操作有时要特殊处理
- 指定结点的前插操作(给一个结点和要插入的数据),可以在结点后面插入然后交换两者的数据
- 指定结点的删除操作,得到后继结点的数据并删除后继结点
- 头插可以用于链表的逆置
- 双链表
- 循环链表
- 循环单链表
- 循环双链表
- 静态链表
3 栈和队列¶
3.1 栈¶
LIFO
栈的实现:
- 顺序实现
- 初始化 top = -1
- 初始化 top = 0
- 共享栈
- 链式实现,用单链表实现,头插,头删
卡特兰数: $$ \frac{1}{n+1}C^n_{2n} $$
3.2 队列¶
FIFO
队列的实现:
- 顺序实现
- 设置队首和队尾指针,队尾指向队尾元素的下一个
- 判断为空, rear == front
- 判断队列空或满
- (rear + 1) % size == front(循环队列),留一个位置的原因是为了不和判断为空冲突
- 定义队列长度的变量,定义的话队列可以多一个空间,且一个 int 占用的空间很可能比存储的队列元素小
- 定义 tag 表示上一次操作是插入还是删除,0 表示删除,1 表示插入;tag 初始化为 0(只有插入才可能导致队空)
- 队列元素个数 :(rear + size - front) % size
- 链式实现
- 定义头指针和尾指针
- 尾插首删
双端队列:
- 队首和队尾都可以插入和删除
- 输入受限的双端队列:一端插入,双端输出
- 输出受限的双端队列,一端输出,双端输出
3.3 栈和队列的应用¶
栈的应用:
- 括号匹配
- 表达式求值
- 波兰表达式(前缀表达式),逆波兰表达式(后缀表达式);
- 计算后缀表达式时栈中存放操作数,从左往右扫描后缀表达式;
- 计算前缀表达式时存放操作数,从右往左扫描前缀表达式,需要注意除法和减法时操作数运算的顺序和后缀表达式不一样;
- 中缀表达式转换后缀表达式时栈中存放运算符和括号,弹出优先级大于或等于要压栈的运算符,遇到右括号就都弹出直到遇到左括号
- 中缀表达式的计算:中缀转后缀,计算后缀;要用到 2 个栈一起操作
- 递归,函数调用时在栈中压入下一条指令的地址和函数中需要的变量
队列的应用:
- 树的层次遍历
- 图的bfs
- 操作系统分配系统资源,FCFS,first come first server
3.4 特殊矩阵压缩存储¶
二维数组的行优先和列优先
对称矩阵:只存储对角线和上或下三角区,然后用行优先或者列优先存储
三角矩阵:和对称矩阵类似,上三角矩阵多存储一个下三角中的常数,下三角类似
三对角矩阵(带状矩阵):只存储 \(|i-j| <= 1\) 的元素,除了第一行和最后一行每行都有三个元素
稀疏矩阵:三元组,十字链表
4 串¶
4.1 串的存储结构¶
- 顺序存储
- 链式存储
4.2 串的模式匹配¶
主串,子串,模式串
朴素的匹配算法复杂度:\(O(mn)\)
KMP:字符串下标从 0 开始
// 字符串下标从 0 开始
// next
void getNext(char *p, int *next) {
next[0] = -1;
int i = 0, j = -1;
while(i < strlen(p))
if(j == -1 || p[i] == p[j]){
i++, j++;
next[i] = j;
}
else j = next[j];
}
// KMP
// 主体字符串 匹配字符串
int KMP(char *s, char *p){
int i = 0;
int j = 0;
while(i < strlen(s) && j < strlen(p))
if(j == -1 || s[i] == p[j]) i++, j++;
else j = next[j];
// 返回存在与 p 相同的字串的位置
if(j == strlen(p)) return i-j;
else return -1;
}
KMP 优化:nextval 数组
5 树¶
要注意不要把树的性质,二叉树的性质,完全二叉树的性质搞混,当然,二叉树也有树的性质,完全二叉树也有二叉树的性质
5.1 树的基础知识和性质¶
基础知识:
-
树的概念
-
祖先节点,子孙结点,父节点,孩子结点,兄弟结点,堂兄弟结点
-
路径(从上到下,兄弟结点之间不存在路径),路径长度,树的路径长度(根到所有结点路径长度之和)
-
结点的层次(深度),度,树的高度(深度),树的度(各结点的度的最大值)
-
有序树(不可以交换),无序树
-
森林
树的性质
- 结点数 = 总度数 + 1
- 度为 m 的树 和 m 叉树的区别,m 叉树的度不一定为 m
- 度为 m 的树第 i 层至多有 \(m^{i-1}\) 各结点
- 高度为 h 的 m 叉树至多有 \(\frac{m^h-1}{m-1}\)
- 高度为 h 的 m 叉树至少有 h 个结点,高度为 h,度为 m 的树至少有 h+m-1 个结点
- n 个结点的 m 叉树的最小高度 \(ceil(\ \ log_m(n(m-1)+1)\ \ )\)
5.2 二叉树¶
二叉树特点:
- 每个节点至多只有两棵子树
- 二叉树是有序树
特殊的二叉树:
- 满二叉树,不存在度为 1 的结点
- 完全二叉树 ,至多只有一个度为 1 的结点,只有一个孩子的结点一定是有左孩子
- 二叉排序树
- 平衡二叉树,不要求是二叉排序树
二叉树性质:
- 树的性质
- \(n=n_0+n_1+n_2,n=2n_2+n_1+1\) 得到 \(n_0 = n_2 + 1\)
完全二叉树性质:
- 高度 \(h=ceil(\ log_2(n+1)\ ) 或 floor(\ log_2n\ )+1\)
- \(n_1=0或1\)
- \(n_0=n_2+1\) 得 \(n_0+n_2\) 一定是奇数
- 若完全二叉树有 2k 个结点,则 \(n_1=1,n_0=k,n_2=k-1\),若完全二叉树有 2k-1 个结点,则 \(n_1=0,n_0=k,n_2=k-1\)
二叉树的存储结构
- 顺序存储
- 链式存储
- n个结点有 2n 个指针,n-1 个没有指向 NULL,所以有 n+1 个指向 NULL
- 二叉链表,三叉链表(带父结点)
5.3 二叉树的遍历¶
层次遍历:队列
先序遍历:前缀表达式
中序遍历中:中缀表达式(无括号)
后序遍历:后缀表达式
非递归的代码实现方式:利用栈;后续遍历的非递归比较难
由遍历序列构造二叉树
- 前序+中序
- 后序+中序
- 层序+中序
5.4 线索二叉树¶
二叉树的线索化和线索二叉树的遍历的代码
增加 2 个标志位表示左右孩子指针是否是线索,注意在线索二叉树遍历时遍历左右子树时要判断是否是前后继(如果不判断,在前序遍历时会绕圈)
中序线索二叉树
先序线索二叉树
后序线索二叉树
中序前驱,中序后继
前序前驱,前序后继
后序前驱,后序后继
二叉树的线索化:
- 前序线索化时要注意判断 tag;
- 函数体主要由 2 个线索化左右子树的递归调用组成,还有利用参数的 pre 建立 pre 的后继 和 当前结点的前驱;不同的遍历方式顺序不同
线索二叉树中找前序和后继:
- 中序
- 先序:找前驱结点如果没有父节点找不到,如果有父节点需要分四种情况(第四种根结点)
- 后序:找后继序也需要三叉链表,分四种情况(第四种根结点)
5.5 树的存储结构和遍历¶
存储结构:
- 双亲表示法(顺序存储),增加结点,删除结点
- 孩子表示法(顺序+链式)
- 孩子兄弟表示法(链式存储),两个指针:第一个孩子和右兄弟指针(树和二叉树的转换,森林和二叉树的转换)
树的遍历:
- 先根遍历(和转换为二叉树后的先序遍历一样 )
- 后根遍历(和转换为二叉树后的中序遍历一样 )
- 层次遍历(队列,bfs)
森林的遍历:
- 先序遍历,依序对子树进行先序遍历(和转换为二叉树后的先序遍历一样 )
- 中序遍历,依序对子树进行后根遍历(和转换为二叉树后的中 序遍历一样 )
5.6 二叉排序树,平衡二叉树,哈夫曼树¶
二叉排序树(BST):
- 构造,查找,增加
- 删除:要删除的结点时叶子节点,只有左子树,只有右子树,左右子树都有(把右子树最小的数或者左子树最大的数搬上来,即中序遍历中的直接前驱和直接后继)
- 平均查找长度(ASL),查找失败的ASL
平衡二叉树(AVL,发明人首字母组成 或者 BBT):二叉排序树的特殊形式,左子树和右子树的高度差不超过 1
- 平衡因子,结点的平衡因子=左子树高-右子树高,AVL 中所有结点的平衡因子只有 -1,0,1
- 最小不平衡子树
- 调整最小不平衡子树
- LL,右旋
- RR,左旋
- LR,先左旋,再右旋
-
RL,先右旋,再左旋
-
查找效率分析:\(O(log_2n)\) :
假设 \(n_h\) 表示高度为 \(h\) 的平衡二叉树的的最少结点数,有 \(n_0=0, n_1=1, n_2=2, n_h=n_{h-1}+n_{h-2}+1\)
哈夫曼树(是二叉树):
- 结点的权,结点的带权路径长度:根到结点的路径长度 x 结点权值,树的带权路径长度(WPL):树中所有叶子结点的带权路径长度之和
- 哈夫曼树:WPL最小的二叉树,也称最优二叉树
- 哈夫曼树的构造:先选 2 个权值最小的结点加起来变成一个新的结点 .....
- 哈夫曼树的总结点树为 \(2n-1\),n 个叶子结点,多出来 n-1 个新结点;哈夫曼树不存在度为 1 的结点;哈夫曼树并不唯一,但 WPL 一定最优
- 哈夫曼编码,非前缀编码会有歧义
5.7 红黑树¶
红黑树是满足以下红黑性质的二叉排序树(不是二叉平衡树):
- 每个结点是红色或者黑色的
- 根结点是黑色的
- 叶结点(虚构结点,NULL)都是黑色的
- 不存在相邻的红结点
- 对每个结点,从该结点到任一叶结点的简单路径上的黑结点的数量相同(黑高);根的黑高是红黑树的黑高
结论1:
- 从根到叶结点的最长路径不大于最短路径的2倍
- 从根到任一叶结点的简单路径最短时,这条路径必然全是黑结点
- 当某条路径最长时,这条路径是由黑结点和红结点相间构成的,红结点和黑结点的数量相同
结论2:
- 有n个内部结点的红黑树的高度 \(h<=2log_2(n+1)\) ;证:根的黑高至少为 h/2,于是有 \(n>=2^{h/2}-1\) 即可
综上:红黑树是适度平衡的,由AVL的高度平衡变成了任一结点的左右子树的高度不相差2倍
红黑树的插入结点\(z\):
- 用二叉查找树插入法插入,并把 \(z\) 涂成红色,如果 \(z\) 父结点是黑色的,无需做调整
- 如果 \(z\) 是根结点,涂黑然后树的黑高 加一
- 如果 \(z\) 不是根结点,并且 \(z.p\) 是红色的(\(z.p.p\) 是黑色的),分为以下三种情况:
- 情况一:\(z\) 的叔结点 \(y\) 是黑色的,且 \(z\) 是右孩子;解决办法:先左旋(变成了情况二),再右旋
- 情况二:\(z\) 的叔结点 \(y\) 是黑色的,且 \(z\) 是左孩子;解决办法:右旋,\(z.p\) 和 \(z.p.p\) 要互换颜色
- 如果 \(z.p\) 是 \(z.p.p\) 的右孩子,则和上面的两种情况是对称的
- 情况三:如果 \(z\) 的叔结点 \(y\) 是红色的;不管 \(z\) 是左孩子还是右孩子,把爷结点变成红色,把父结点和叔结点变成黑色,然后爷结点变成新的 \(z\) 继续处理,即 \(z\) 上移了两层
红黑树的删除:可以参考的blog
- 用二叉查找树的删除结点的办法
- 第1种情况:如果被删除结点有左右孩子,就把其中序遍历的后继(或者前驱)结点的数值与其替换,问题变换成下面2中情况
- 第2种情况:待删结点只有左孩子或者右孩子,那么只有可能待删除的是黑色,左孩子或者右孩子是一个红色结点,把结点删了然后把孩子换上来变成黑色即可
- 第3种情况:待删结点没有孩子
- 待删结点没有孩子并且是红色的,直接删除即可
- 待删结点是黑色的,删除待删结点后变成 null 结点再套一层黑色 (或者是双黑结点)代替,叫做 \(x\),问题变为如何把多的那层黑色消去,区别在于 \(x\) 的兄弟结点 \(w\) 以及 \(w\) 的孩子结点的颜色
- 情况1:\(w\) 是红色的,那么 \(w\) 必然是有黑色左右孩子,处理办法是交换 \(x.p\) 和 \(w\) 的颜色,既然后进行一次单向旋转,问题变为情况2,3 或 4
- 情况2:\(w\) 是黑色的,\(w\) 的左孩子是红色的,\(w\) 的右孩子是黑色的;即红色结点是爷结点的右孩子的左孩子,处理办法是先交换 \(w\) 和其左孩子的颜色再 RL,其中右旋过后其实就变成了情况3
- 情况3:\(w\) 是黑色的,\(w\) 的右孩子是红色的;处理办法是先交换 \(w\) 和 \(x.p\) 的颜色,再把 \(w\) 右孩子变为黑色再 RR(左单旋),然后 \(x\) 可以变回正常黑色
- 情况4:\(w\) 是黑色的且两个孩子结点也都是黑色(或者说无红色子结点)的处理办法是把 \(w\) 和 \(x\) 去掉一层黑色,给 \(x.p\) 加上一层黑色作为新的 \(x\) 去处理(如果 \(x.p\) 是红色的就直接涂黑,如果是黑色的就作为双黑结点继续处理);如果一直处理到根结点,把多的一层黑色直接舍去
- 其他对称情况类似
6 图¶
6.1 图的基本概念¶
线性表可以是空表,树可以是空树,图不可以是空,即 V 一定是非空集,E 可以为空集
无向图,有向图:顶点的有序和无序;弧(有向边)
简单图:无重边,无环;多重图:非简单图
完全图:也称简单完全图,有向与无向
子图:从 V 中取子集,E 做相应的子集;生成子图:\(V(G')=V(G)\)
连通:无向图中 v 和 w有路径存在;强连通:无向图中 v 和 w有路径存在,w 到 v 有路径存在
连通图(无向图),n 个点最少有 n-1 条边,最多有 \(C_{n-1}^2\) 即(\(\frac{(n-1)(n-2)}{2}\))条边,n-1个顶点构成完全图
强连通图(有向图),n 个点最少有 n 条边
连通分量:无向图中的极大连通子图称为连通分量
强连通分量:有向图中的极大强连通子图称为连通分量
生成树:连通图中,包含连通图的全部顶点,且是极小连通子图;少一条边就非连通,多就有环
生成森林:非连通图中,连通分量的生成树构成了生成森林
邻接,关联:无向图中 \((v, v')\),\(v,v'\) 互为邻接点,\((v, v')\) 和 \(v,v'\) 相关联;有向图中 \(<v, v'>\),称 \(v\) 邻接到 \(v'\),\(<v, v'>\) 和 \(v,v'\) 相关联
度(TD),出度(OD),入度(ID);有向图的度为 入度 + 出度
无向图:\(\sum TD(V_i)=2|E|\)
有向图:\(\sum OD(V_i)=\sum ID(V_i)=|E|\)
边的权,带权图(也叫网),带权路径长度
路径:顶点序列
回路
简单路径:顶点不重复出现;简单回路:除了起点和终点,顶点不重复
距离:最短路径长度或无穷
稀疏图,稠密图
树:不存在回路且连通的图;森林:
有向树:只有一个顶点的入度为0,其他顶点的入度都为 1
6.2 图的表示法和基本操作¶
邻接矩阵法(空间复杂度 \(O(v^2)\)),假设矩阵为 \(A\),则 \(A*A\) 表示路径长度为 2 的路径数目,\(A^n\) 表示路径长度为 n
邻接表(空间复杂度有向图 \(O(V+E)\),无向图 \(O(V+2E)\))
十字链表(存储有向图,空间复杂度 \(O(V+E)\))
邻接多重表(存储无向图,空间复杂度 \(O(V+E)\))
6.3 bfs && dfs¶
bfs:队列,空间复杂度 \(O(V)\) (队列的长度) 时间复杂度 邻接矩阵 \(O(V^2)\),邻接表 \(O(V+E)\)
广度优先生成树(不是最小的,且如果用邻接表不唯一)
广度优先生成森林(图中有多个连通分量时)
dfs:空间复杂度 \(O(V)\)(函数递归调用栈) 时间复杂度 邻接矩阵 \(O(V^2)\),邻接表 \(O(V+E)\)
深度优先生成树(不是最小的,且如果用邻接表不唯一)
深度优先生成森林(图中有多个连通分量时)
判环用 拓扑排序 和 dfs,如果在 dfs 要访问的元素已经访问过并且还在栈中时,说明有环;bfs 不行的原因是可能有多个结点指向该结点,不一定是因为有环
6.4 最小生成树和最短路¶
最小生成树(MST),非连通图只有生成森林
-
Prim:\(O(V^2)\)
-
Kruskal(并查集):\(O(ElogE)\)
最短路径
- 各顶点间最短路
- Floyd(带权图,无权图),可以用 path 记录中转点来记录路径,时间复杂度 \(O(V^3)\),空间复杂度 \(O(V^2)\)
- 单源最短路问题
- BFS(无权图)
- Dijkstra(带权图,无权图),注意与 Prime 算法的区别在 dis 的含义和松弛操作;记录每个结点的前驱来记录路径,时间复杂度 \(O(V^2)\)。不适用于负权边
6.5 有向无环图与应用¶
有向无环图(DAG,Directed acyclic graph)
- 描述表达式,并进行图的优化
- AOV 网(Activity On Vertex NetWork),用 vertex 表示活动
- 拓扑排序:
- 算法:入度的统计可以用一个数组indegree实现,E是删除结点时更新indegree需要的时间,用队列或栈记录indegree为0的结点
-
时间复杂度,邻接表 \(O(V+E)\),邻接矩阵 \(O(V^2)\);逆拓扑排序(每次删除出度为 0 的结点):邻接表 \(O(VE)\),邻接矩阵 \(O(V^2)\),逆邻接表 \(O(V+E)\) ;使用逆邻接表即可实现拓扑排序的正逆;使用 dfs 求拓扑序 用DFS解拓扑排序
-
AOE 网(Activity On Edge NetWork),用 edge 表示活动,结点表示事件,只有一个入度为 0 的顶点(源点),一个出度为 0 的顶点(汇点);源点到汇点的最长路径叫关键路径(可能有多条),上面的活动叫关键活动
- 事件的最早发生时间(ve,按照拓扑序求 max),活动的最早开始时间(e,弧起始点的 ve)
- 事件最迟发生时间(vl,按照逆拓扑序求 min),活动最迟开始时间(l)( min(弧终点事件的最迟发生时间-活动时间))
- 活动的时间余量(d),活动的最早开始时间和最迟开始时间相同的活动(d=0)是关键活动
6.6 并查集¶
int fa[MAXN];
void init(int n) {
for (int i = 0; i < n; i++) fa[i] = i;
}
int find(int x) {
if (fa[x] != x) fa[x] = find(fa[x]);
return fa[x];
}
void unite(int x, int y) {
int fx = find(a);
int fy = find(b);
fa[fx] = fy;
}
bool same(int x, int y) {
return find(x) == find(y);
}
7 查找¶
7.1 基本概念¶
查找,查找表(数据集合),关键字(唯一标识数据的值)
静态查找表(只会查找),动态查找表(会进行插入和删除),静态查找表用顺序存储,动态查找表用二叉排序树
平均查找长度 ASL
7.2 查找算法¶
顺序查找
- 哨兵(放在 a[0],从尾部往前查找)
- 分析ASL,\(ASL_{成功}=(n+1)/2,ASL_{失败}=n+1\)
- 顺序查找的优化
- 有序表的顺序查找可以提前停止,用判定树分析,\(ASL_{失败}=n/2+n/(n+1)\)
- 被查找概率大的放在靠前的位置
折半查找
- 仅适用于有序的顺序表
- 查找效率分析 ASL,\(O(long_2n)\)
- 折半查找判定树的树高 \(h=ceil(log_2(n+1))\) ,且是二叉排序树,且平衡,失败结点有 n+1
分块查找 / 索引顺序查找
- 块内无序,块间有序
- 先查索引表,可顺序,可二分(很麻烦)
- 查找效率分析,有 b 块,每块 s 个元素
- 顺序查找索引表,\(ASL=\frac{b+1}{2}+\frac{s+1}{2}\),当 \(s=\sqrt{n}\) 时,ASL 最小 = \(\sqrt{n} + 1\)
- 折半查找索引表,\(ASL=ceil(log_2(b+1))+\frac{s+1}{2}\)
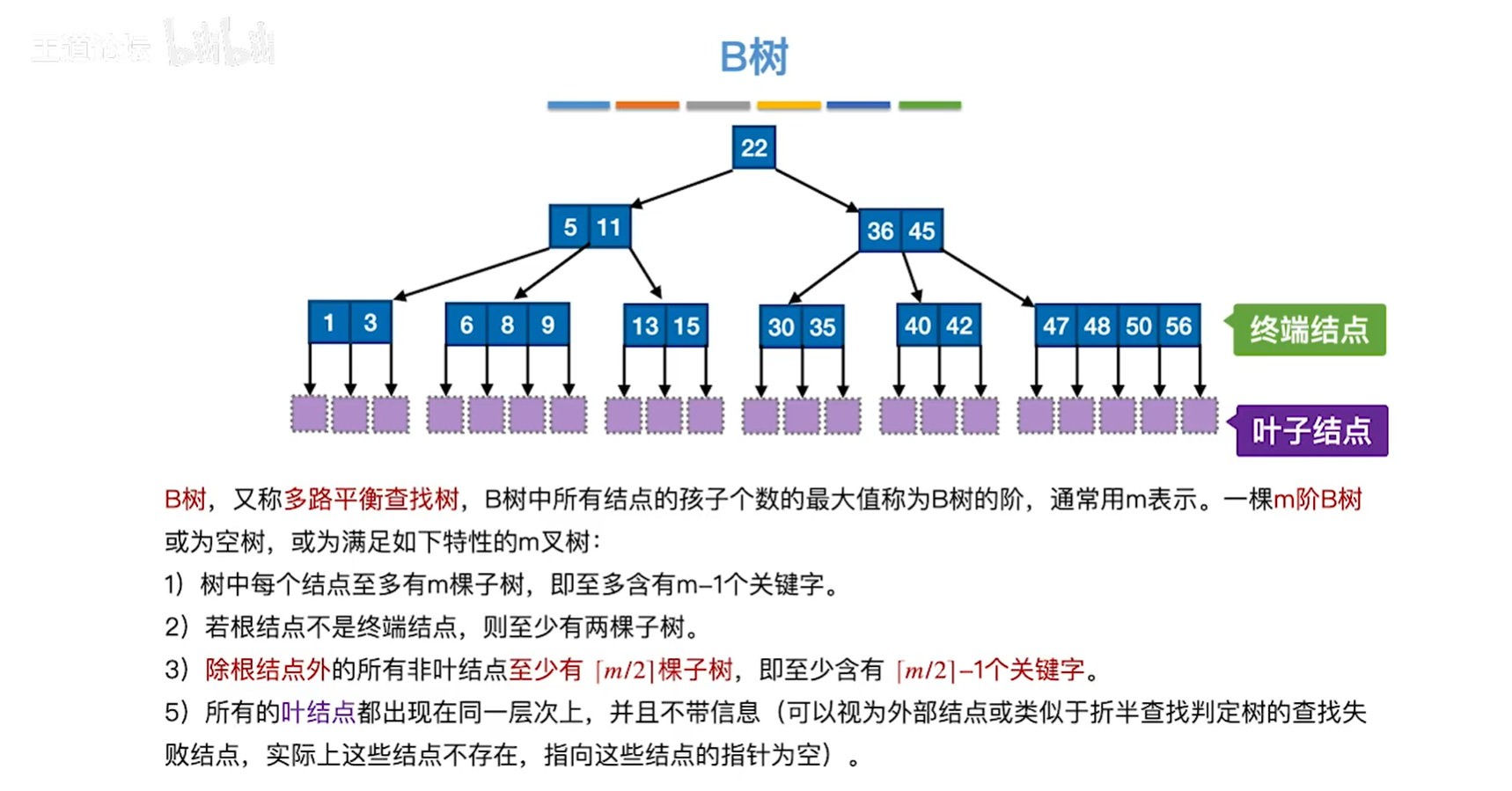
7.3 B树¶
二叉查找树变为 m 叉查找树,结点中的关键字是有序的,所以可以二分
struct Node {
Elemtype keys[4]; // 最多4个关键字
struct Node* child[5]; // 4个关键字最多5个分叉,最多5个孩子
int num; // 记录结点中有几个关键字
}
保证查找效率:
- 规定 m 叉查找树中除了根结点外,任何结点至少有 \(ceil(m/2)\) 个分叉,\(ceil(m/2)-1\) 个关键字
- 对于任何一个结点其子树的高度要相同
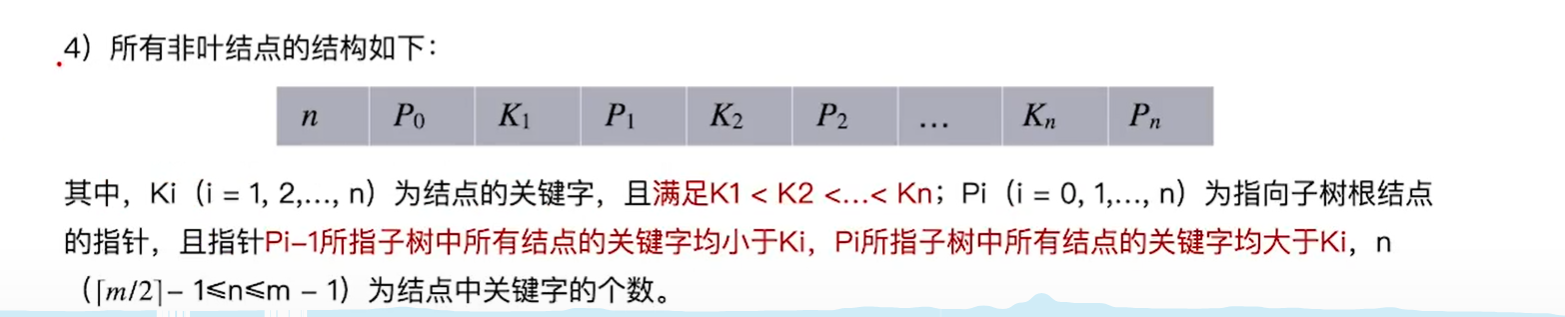
B树定义:
含 n 个关键字的 m 阶 B 树的最小高度: $$ n<=(m-1)(1+m+m^2+...+m^h) \ h >= log_m(n+1) $$ 最大高度:
思路一:
让各层分叉尽可能的小,第一层 2 个分叉,其他结点 \(ceil(m/2)\) 分叉,所以各层结点数:\(1,2,2ceil(m/2),...2ceil(m/2)^{h-2}\),则 \(h+1\) 层共有叶子结点(失败结点)\(2ceil(m/2)^{h-1}\) ;因为 n 个关键字的B树必有 n+1 个叶子结点(n个数字分成了 n+1 个区间),所以 \(n+1>=2ceil(m/2)^{h-1}\),得 \(h<=log_{ceil(m/2)}\frac{n+1}{2}+1\)
思路二:设 \(k=ceil(m/2)\)
| 最少结点数 | 最少关键字数 | |
|---|---|---|
| 第一层 | 1 | 1 |
| 第二层 | 2 | 2(k-1) |
| 第三层 | 2k | 2k(k-1) |
| .... | ... | ... |
| 第h层 | \(2k^{h-2}\) | \(2k^{h-2}(k-1)\) |
h 层 m 阶 B 数至少包含关键字总数 \(1+2(k-1)+...+2k^{h-2}(k-1)=1+2(k^{h-1}-1) <= n\),得 \(h<=log_{ceil(m/2)}\frac{n+1}{2}+1\)
B 树的插入(王道视频P73,书P297):
- 如果只有根结点,就插入根结点,满了就分裂成 3 个结点(1个根结点 2 个子结点,根结点上传)
- 新元素一定要插入最底层的终端结点(保持失败结点在最底层的特性),满了也是分裂
B 树的删除(王道视频P73,书P298):
- 要删除的关键字在终端结点,结点中关键字大于 \(ceil(m/2)\) 就直接删除
- 如果不在终端结点中就直接用前驱或者直接后继(是在终端结点中的)代替,替代不影响 关键字大于 \(ceil(m/2)\) 的条件),如果小于了就让后继的后继(父节点下来,后继的后继当父节点)或者前驱的前驱(父节点下来,前驱的前驱当父节点)来填补,没的借就合并

7.4 B+树¶
类比分块查找
定义2:非叶(形容词)根结点
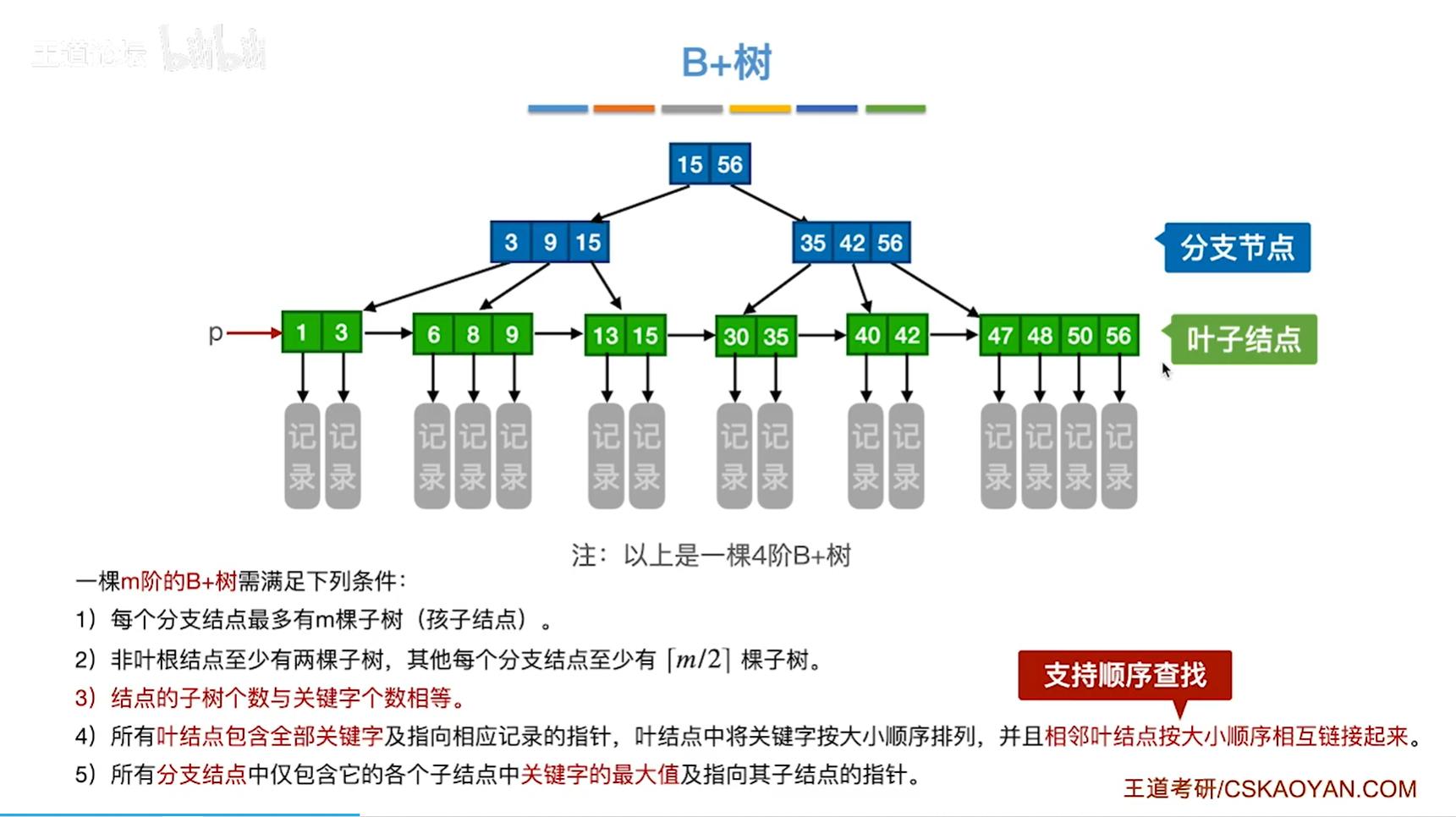
B+树的查找除了按照层次往下查找也可以按指针P顺序查找
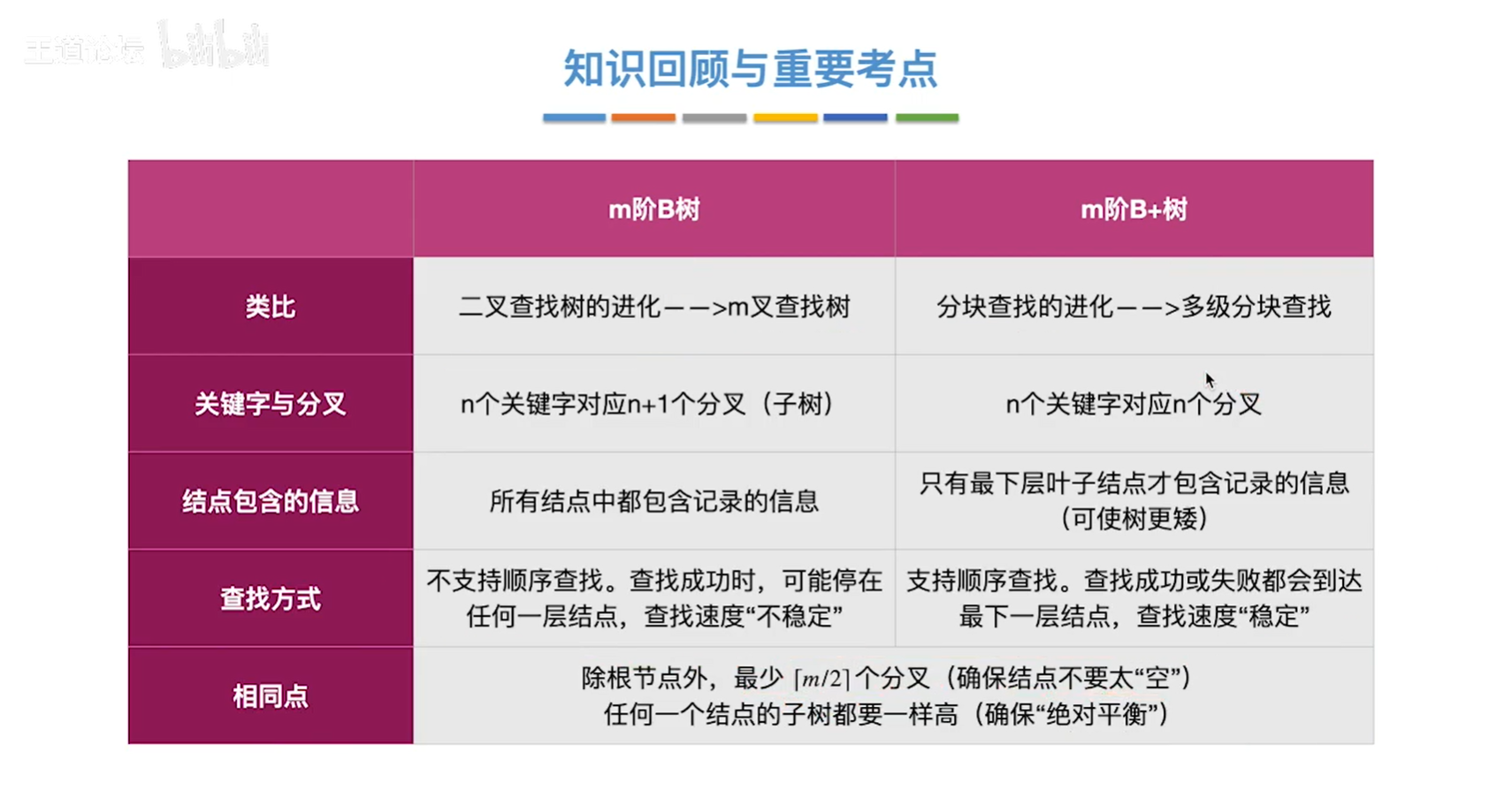
B+树和B树的对比
m阶B+树:
- 结点中n个关键字对应n个子树
- 除根结点外的结点的关键字数 \([\ ceil(m/2),m\ ]\)
- 叶子结点包含全部的关键字,非叶子结点中出现过的关键字也会在叶子结点中
- 所有非叶子结点只起到索引作用,不包含该关键字的对应记录的存储地址
m阶B树:
- 结点中n个关键字对应n+1个子树
- 除根结点外的结点的关键字数 \([\ ceil(m/2)-1, m-1\ ]\)
- 各结点的关键字不重复
- 结点包含了关键字对应的记录的存储地址
7.5 散列查找¶
散列表=哈希表,散列函数=哈希函数,同义词,冲突,聚集
查找长度(如果是空,查找长度=0),计算 \(ASL_{成功}\),\(ASL_{失败}\)(注意计算失败的时候主要和哈希函数有关和当前表内状态有关)
装填因子\(\alpha\)=表中记录数/散列表长度
常见散列函数:
- 除留余数法,散列表长度为 m,除数取不大于 m 的最大质数 p,会让哈希数值域小于散列表长度,再用开放定址法可以恢复
- 直接定址法,做一个线性变换 H(key) = a*key+b
- 数字分析法,选取数码分布均匀的若干位作为散列地址
- 平方取中法,取平方值的中间几位作为散列地址
处理冲突的方法:
- 拉链法,小优化:使链表有序,如果查找失败可以提前返回
- 开放定址法 \(H_i=(H(key)+d_i)\%m\),查找失败时对空位置的判断也算一次比较;在删除结点时要做标记,以便后面查找时继续探测
- 线性探测法,\(d_i=0,1,2,3,4...\)
- 平方探测法(二次探测法),\(d_i=0,1,-1,4,-4,9,-9...,k^2,-k^2\) ,\(k<=m/2\),散列表长度 m 必须是一个可以表示成 4j+3 的素数才可以探测到所有素数
- 伪随机序列法
- 再散列法,多准备几个散列函数
注意在删除时要做标记,不然下次查找时可能会有问题
8 排序¶
这部分要注意代码
8.1 基本概念¶
空间和时间复杂度
算法的稳定性
分类:
- 内部排序,数据都在内存中,关注时间空间复杂度
- 外部排序,数据太多,无法全部放入内存,还要关注使读/写磁盘次数更少
8.2 插入排序:插入排序和希尔排序¶
插入排序:
- 每次将待排序的记录按照关键字大小插入前面已排好的子序列中
- 如果有哨兵,哨兵用来复制待排序的记录
- 空间复杂度 \(O(1)\),时间复杂度 \(O(n^2)\)
- 稳定性:稳定
- 优化?:对前面已排好的子序列用折半查找,为了保证稳定性在找到之后还要继续找直到 low>high,然后把 [low, i-1] 内的元素右移,时间复杂度 \(O(n^2)\)
- 如果用链表存储,时间复杂度 \(O(n^2)\)
希尔排序:对插入排序的优化;由部分有序逼近全局有序
- 由增量 \(d\) 分成多个子表后对子表插入排序,然后缩小增量 \(d\) 直到 \(d=1\);\(d\) 建议初值为 \(n/2\),然后每次 \(d_{i+1}=d_i/2\);
- 空间复杂度:\(O(1)\);时间复杂度: \(O(n^{1.3}) 到 O(n^2)\)
- 稳定性:不稳定
- 只能基于顺序表
8.3 交换排序:冒泡排序和快速排序¶
冒泡排序:
- 每轮都找到一个未排序的数放到最前面(或者找最大的放后面)
- 时间复杂度:\(O(n^2)\) ,空间复杂度:\(O(1)\)
- 稳定性:稳定
- 冒泡排序适合链表
- 优化:某一趟没有交换就可以提前结束
快速排序(重要 ):
- 在表中任取一个元素作为枢轴或基准,划分为左右 2 部分(实现时有一个 low 和 high 不断向内移动),然后递归
- 如果表原本就是有序或者逆序,时间复杂度:\(O(n^2)\),空间复杂度:\(O(n)\);如果基准元素选的好,时间复杂度:\(O(nlog_2n)\),空间复杂度:\(O(log_2n)\)
- 枢轴的选取,选取头中尾三个元素选中间的,或者随机选择
- 稳定性:不稳定
- 一趟排序:可以确定多个元素的最终位置(比如第一趟确定1个,第二趟可以确定2个);一次划分(partition):只可以确定一个元素的最终位置
8.4 选择排序:简单选择排序和堆排序¶
选择排序:
- 在待排序的表中找到最小的,然后和待排序的表中第一个元素调换
- 空间复杂度:\(O(1)\),时间复杂度:\((O(n^2))\),且无法提前停止,即在任何情况下时间复杂度不变;排序过程中移动次数很少
- 稳定性:不稳定
- 可以适用于链表
堆排序(重要):
- 利用大根堆或小根堆实现;大根堆(大顶堆):根结点的数大于左右子树
- 建立大根堆,检查非终端结点的编号 \(i<=floor(n/2)\);编号从大到小检查,如果不 比自己孩子结点都大,与 2 个孩子中大的交换,交换后还要向下检查(可能会破坏下面的堆的性质);注意建立大根堆时表的下标一般从 1 开始方便计算孩子的下标
- 堆排序:每一趟将最后一个元素换到堆顶;再调整大根堆(小元素下坠)
- 时间复杂度:\(O(nlog_2n)\),空间复杂度:\(O(1)\)
- 建立初始大根堆的复杂度:\(O(n)\) ,不超过 4n
- 稳定性:不稳定
堆的插入和删除:以小根堆为例
- 插入:放在表尾(堆低),往上提
- 删除:用堆底(表尾)的元素替换删除的位置,然后向下坠;要注意下坠的时候如果有2个孩子,每次下坠都要对比2次,一个孩子只需要对比一次
8.5 归并排序和基数排序¶
归并排序:一般都是 2 路归并
- 将原序列拆成 2 部分进行递归归并排序
- 代码实现时有三个指针(int型),low,mid,high,开新的空间复制过去,在原列表中归并
- 2 个函数 MergeSort 和 Merge
- 时间复杂度:\(O(nlog_2n)\),空间复杂度:\(O(n)\) (merge中的辅助空间)
- 稳定性:稳定
基数排序:按个位先排好,再按十位排好 。。。。
- 基数 \(r\):比如十进制就是 10,表示有 10 种不同的取值
- 排序时需要设置 \(r\) 个辅助队列,\(Q_{r-1},...,Q_0\),按照权重低的到权重高的顺序,进行 \(d\) 次分配再收集, \(d\) 表示有几位
- 时间复杂度 \(O(d(n+r))\),一趟分配 \(O(n)\),一趟收集 \(O(r)\),空间复杂度 \(O(r)\),即 r 个辅助队列
- 稳定性:稳定
- 应用:按照学生年龄递减排序,权重 年>月>日,年月日越大,年龄越小;所以第一躺按分配,收集按 日 递增,即先收集 日 小的。。。基数 \(r\) 在年月日是不同的
- 基数排序擅长解决的问题:数据可以方便的拆分为 d 组,并且 d 和 r 小的
8.7 外部排序¶
外部排序:
- 外存和内存以块为单位读写
- 构造初始的归并段:在内存中开三块的空间,每次读入连续的 2 块进行归并排序,然后写回去,假设有 n 块,则得到 n/2 个归并段,一共读写了 2n 次;然后不断的归并成更大的段(这里要知道怎么用内存中三块的空间去归并,外存需要开额外的空间)
- 外部排序的时间开销=读写外存的时间+内部排序的时间(生成初始归并段)+内部归并所需时间;时间主要花在了读写外存上
- 总读写磁盘次数 = 文件总块数 *2* (归并趟数 + 1)(构造初始归并段+归并的趟数)
- 优化思路1:减少归并的趟数,可以使用多路归并,内存需要更多的缓冲区,空间换时间;假设有 r 个初始归并段,做 k 路归并
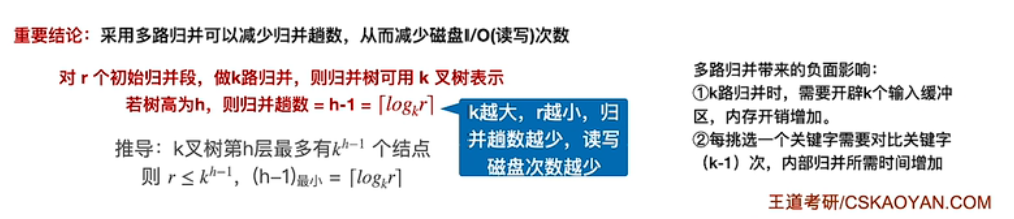
- 优化思路2:增加初始归并段的大小(内存需要的块数要变大),即减少初始归并段的数量 r
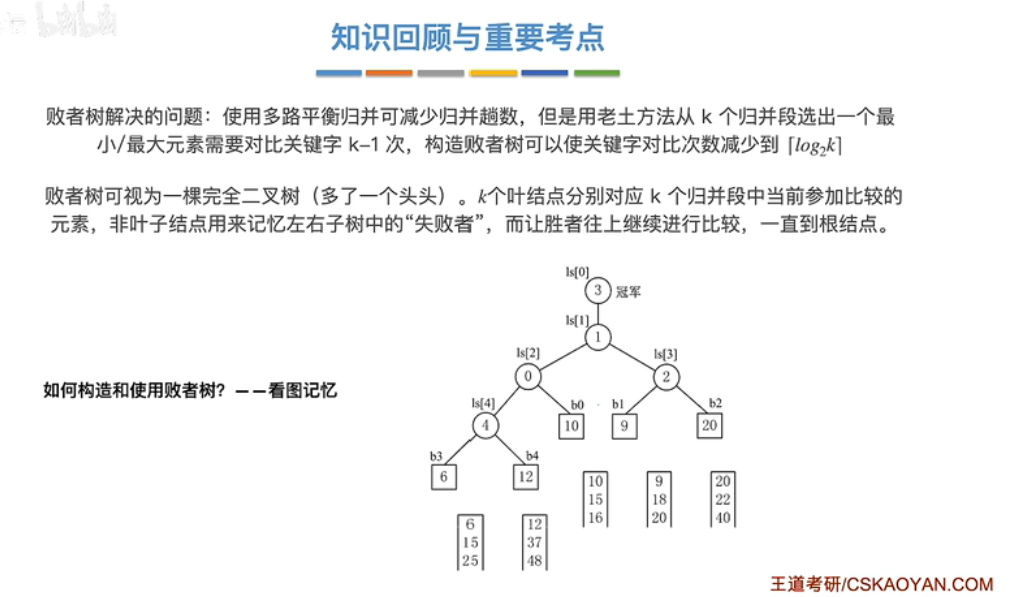
败者树:
k 路归并 k 过大时会导致选出一个最小元素需要对比 k-1 次,败者树可以优化这个;败者树的结点存放失败者,最后多一个额外的结点存储冠军
有了败者树,选出最小元素只需要对比关键字 \(ceil(log_2k)\) 次
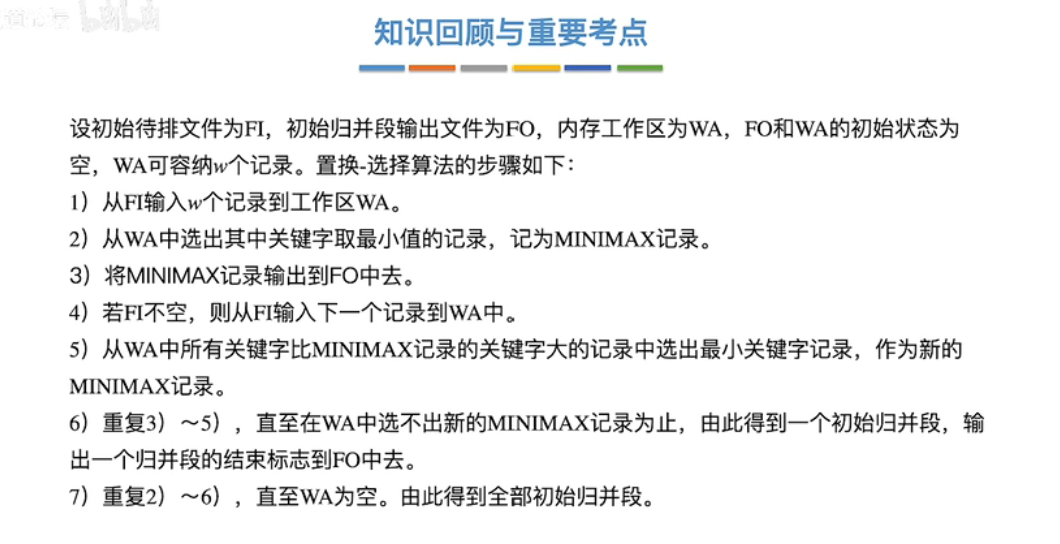
置换选择排序:
原本的办法,如果内存可容纳 \(l\) 个记录,文件一共有 \(n\) 个记录,则初始归并段的数量 \(r = n/l\);
置换选择排序时记录已经输出的最小数值 \(min\),每次输出最小的且大于 \(min\) 的数,更新 \(min\) 再读入新的;小于 \(min\) 的留在内存内,直到内存内的都小于 \(min\);这样做每次得到的初始归并段长度并不一定相同
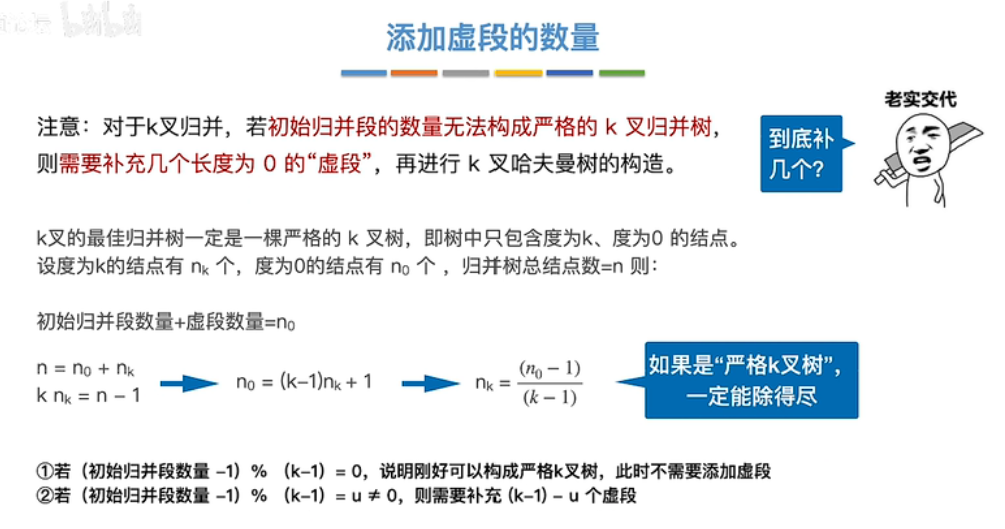
最佳归并树
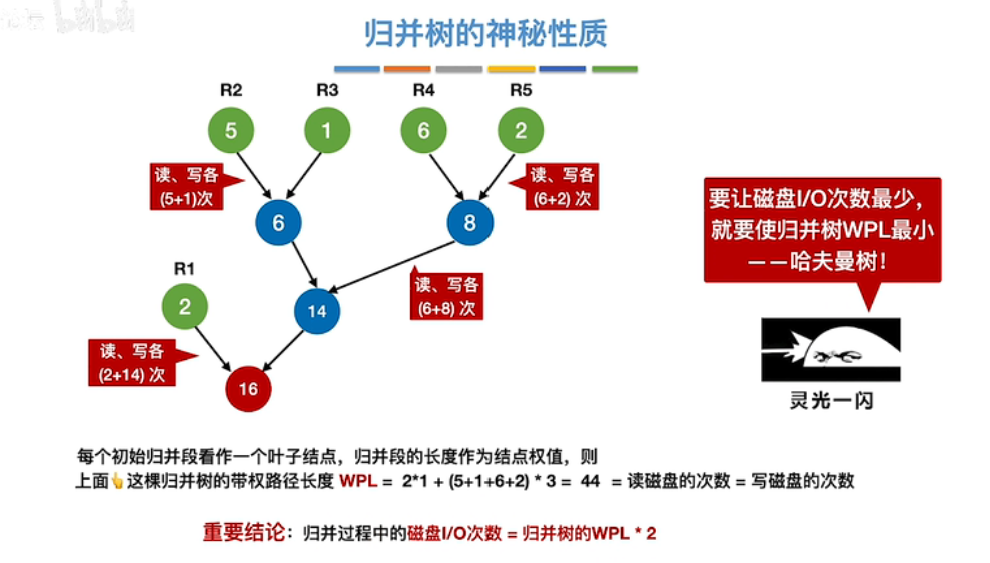
二路归并和多路归并原理相同,都是构造哈夫曼树;对于 k 叉归并,如果初始归并段数量无法严格构成 k 叉归并树,需要补充长度为 0 的 "虚段"
总结¶
串¶
-
next[i] 的值和 模式串中 i 前的子串的最大相同前后缀长度 k 决定,如果串索引由1开始,就是 k+1,否则就是 k;
-
计算 next 的过程可以理解为 模式串自己匹配自己的过程
树¶
- 哈夫曼树可以得到一种前缀编码,且带权路径长度是最小的(WPL);且哈夫曼树无度为1的结点,\(n_0=n_2+1\) 会很有用
- 并查集是一种简单的集合表示,find 如果不做路径压缩复杂度为 \(O(n)\)
- 二叉排序树和平衡二叉树
- 红黑树的定义,插入和删除
图¶
topological order:拓扑序,topological sequence:拓扑序列
基本概念
判断有向图是否有环:dfs,拓扑排序,求关键路径
查找¶
B 树 和 B+ 树的区别(至多,至少)
B树中结点和关键字的区别
排序¶
-
直接插入排序 比 折半插入排序的比较次数多了
-
希尔排序的时间复杂度
-
堆排的初始化,插入,删除;要注意小元素下坠时要下坠多次
- 选择排序比较次数是固定的,归并排序比较次数的数量级是固定的
- 基数排序 LSD(最低位优先) 的意思是先从最低为开始排,而不是最低位的重要性最大
- 外部排序常用归并排序
总的需要注意的点:
- 稳定的排序:插入,冒泡,归并,基数
- 每个算法的时间空间复杂度
- 最好情况下实践复杂度可以到达线性:冒泡排序,直接插入
- 排序有多个条件是,先比较重要性小的,再用稳定的排序算法比较重要性大的